
При широком диапазоне применений радиолокации возникло множество радиолокационных технологий, чтобы удовлетворить уникальные потребности в характеристиках, стоимости, размерах и возможностях. Например, многие полицейские радиолокаторы используют радиолокатор непрерывных колебаний (НК), чтобы оценить доплеровский сдвиг от движущихся автомобилей, но информация о дальности им не нужна. В данном случае низкая стоимость и небольшие размеры предпочительнее расширенных возможностей и характеристик. С другой стороны, чрезвычайно сложные радиолокационные станции на фазовых решетках могут иметь тысячи приемопередающих модулей, работающих в тандеме, и могут использовать множество сложных методов, чтобы улучшить такие характеристики, как подавление боковых лепестков, дрожание периода повторения импульсов (ППИ), подвижность частоты, оптимизацию формы колебаний в реальном времени, широкополосную линейную ЧМ, возможность опознавания цели.
После краткого обзора основ радиолокации эти заметки по применению будут сосредоточены на основах измерения базовых импульсных радиолокаторов, так как они являются основой большинства радиолокационных систем. В соответствующих местах заметок по применению будет обсуждаться адаптация определенных измерений для более сложных или модулированных импульсных радиолокационных систем.
1.0 Основы радиолокации и уравнение дальности действия радиолокатора
Основы работы радиолокатора
Фундаментальной природой радиолокатора является возможность собирать информацию о местонахождении цели, её скорости, направлении движения, форме, принадлежности или просто наличии, путем обработки отраженных высокочастотных (ВЧ) или микроволновых (СВЧ) сигналов в случае активных радиолокаторов, или из переданных откликов в случае радиолокаторов с активным ответом. В большинстве реализаций импульсный ВЧ или СВЧ сигнал генерируется радиолокационной системой, направляется по лучу на цель под вопросом и принимается той же антенной, которая передала сигнал. Этот базовый процесс описывается уравнением дальности действия радиолокатора, полученным на странице 6. Мощность сигнала на входе приемника радиолокатора прямо пропорциональна переданной мощности, коэффициенту усиления антенны (или размеру апертуры) и поперечному сечению радиолокатора (ПСР). Возможно более важно, что она косвенно пропорциональна четвертой степени расстояния до цели. При таком большом ослаблении, которое происходит, пока сигнал проходит до цели и обратно, применение высокой мощности является желательным, но трудно достижимым из-за ряда практических проблем, таких как нагрев, пробой напряжения, размер системы и, конечно, стоимость.
Характеристики импульса
Характеристики сигнала импульсного радиолокатора в значительной степени определяют рабочие характеристики и возможности радиолокатора. Мощность в импульсе, частота повторения импульсов, длительность импульса и модуляция импульса подбираются таким образом, чтобы получить оптимальную комбинацию для данного применения. Мощность в импульсе непосредственно влияет на максимальное расстояние или дальность цели, которая может быть обнаружена радиолокатором.
Частота повторения импульсов (ЧПИ) определяет максимальную однозначную дальность цели. Следующий (не кодированный) импульс не может быть послан до тех пор, пока предыдущий импульс идет до цели и обратно. (Кодированные импульсы могут посылаться чаще потому что кодирование может быть использовано для связи откликов с соответствующим переданным импульсом).
Длительность импульса определяет пространственное разрешение радиолокатора: импульс должен быть короче времени, которое необходимо для прохождения сигнала между деталями цели, иначе импульсы частично совпадут в приемнике.
Длительность импульса и форма импульса также определяют спектр сигнала радиолокатора. Уменьшение длительности импульса увеличивает полосу частот сигнала. Более широкие полосы частот системы дают в результате более высокий уровень шума для данной величины мощности, что снижает чувствительность. Также ширина спектра может превысить установленные распределения частот, если импульс слишком короткий.
По форме импульс может быть известным трапециидальным импульсом с короткими, но контролируемыми временами фронта и спада, или с любой альтернативной формой, такой, как форма Гаусса и косинус в квадрате. Форма импульса может определять полосу частот сигнала, а также влиять на обнаружение и идентификацию целей и поэтому изменяется в зависимости от сферы применения.
Короткие импульсы с низкой частотой повторения обеспечивают максимальную разрешающую способность и диапазон однозначности, а высокая мощность в импульсе обеспечивают максимальный диапазон радиолокатора по дальности. Однако имеются практические ограничения в генерировании коротких импульсов с большой мощностью. Например, более высокая пиковая мощность будет сокращать жизнь ламп, используемых в конструкции усилителя. Это может стать барьером в улучшении характеристик радиолокатора, если технология радиолокации остановится на таком уровне. Однако при использовании более сложных форм колебаний и методов сжатия импульса сильные ограничения ширины импульса могут быть значительно смягчены.
Сжатие импульса
Методы сжатия импульса позволяют использовать относительно длинные ВЧ-импульсы не жертвуя разрешением по дальности. Ключом к сжатию импульса является энергия. Используя более длинные импульсы, можно уменьшить пиковую мощность у передаваемого импульса при сохранении той же самой энергии. При приеме импульс сжимается в более короткий с помощью согласованного коррелированного фильтра, который увеличивает пиковую мощность импульса и уменьшает его длительность. Радиолокатор со сжатием импульса, таким образом, реализует многие преимущества короткого импульса, как то: улучшенные разрешающая способность и точность, уменьшенный уровень помех на экране радиолокатора, лучшая классификация цели и больший допуск в некоторых методах электронного противодействия (ЭП) и глушения радиопередач. Одной из областей, в которой не реализуются эти преимущества, является величина минимальной дальности действия. Здесь длинный импульс передатчика может скрыть цели, которые находятся близко от радиолокатора.
Способность сжимать импульс с помощью согласованного фильтра достигается модулированием ВЧ-импульса таким способом, чтобы он содействовал процессу сжатия. Функция согласующего фильтра может быть достигнута цифровым способом, при использовании функции взаимной корреляции для сравнения принятого импульса с переданным. Выборки принятого сигнала периодически смещаются во времени, раскладываются в ряд Фурье и умножаются на сопряженное преобразование Фурье выборки переданного сигнала (или точной его копии). Результат функции взаимной корреляции пропорционален смещенному во времени согласованию двух сигналов. Выброс в функции взаимной корреляции или на выходе согласующего фильтра появляется, когда два сигнала стоят рядом. Этот выброс является отраженным сигналом радиолокатора и типично он может быть в 1000 раз короче по длительности во времени, чем переданный импульс. Даже если два или больше длинных переданных импульса совпадут в приемнике, крутой подъем на выходе произойдет когда каждый из импульсов совпадет с переданным импульсом. Это восстанавливает разделение между принятыми импульсами и, вместе с этим, разрешение по дальности. Заметьте, что принятая форма сигнала проходит через окно, используя окно Хамминга или аналогичное ему, для того чтобы уменьшить боковые лепестки во временной области, возникающие во время процесса взаимной корреляции.
Идеально корреляция между принятыми и переданными сигналами будет высокой только тогда, когда переданный и принятый сигналы точно совпадают. Для достижения этой цели используется множество методов модуляции, которые включают: линейное свипирование по частоте, двоичное кодирование фазы (например коды Баркера) или многофазные коды (например коды Костаса). Графики на рисунке 1, названные диаграммами неопределенности, показывают, как работают различные схемы сжатия импульса в виде зависимости допплеровского сдвига частоты от длительности импульса.
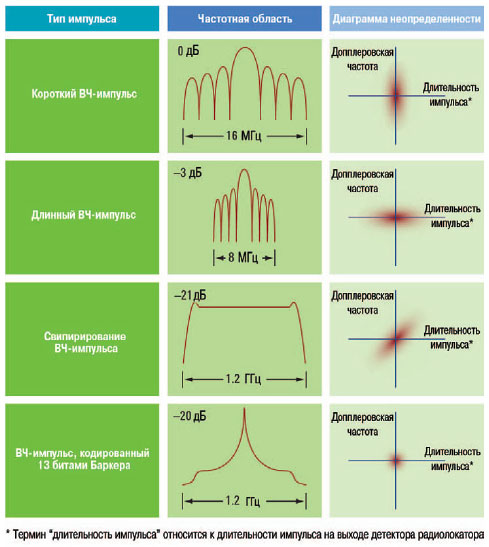
Рисунок 1– Диаграмма неопределенности иллюстрирует зависимость точности определения местоположения от точности допплеровской частоты. На рисунке показаны относительные диаграммы неопределенности для различных типов импульса радиолокатора
Хотя допплеровский сдвиг частоты может вызывать ошибки, он также дает оператору радиолокатора важную информацию о цели.
Доплеровская частота
Многие интересующие нас цели находятся в движении. Движение целей заставляет частоту отраженного сигнала смещаться выше, если цель движется к радиолокатору, и ниже, если цель движется в обратном направлении. Это и есть доплеровское смещение частоты, часто ассоциированное с проходящими машинами скорой помощи и поездами. Как многие люди, которые должны принимать быстро движущиеся билеты, могут их проверять, так полицейские радиолокаторы, использующие допплеровский сдвиг частоты, могут определять радиальную скорость автомобилей (целей). Во многих радиолокационных системах как местоположение, так и радиальная скорость, являются полезной информацией. Допплеровский сдвиг частоты может уменьшить чувствительность обнаружения местоположения. Помните, что выход фильтра взаимной корреляции, используемого для обнаружения, пропорционален совпадению принятого и переданного сигналов. Если принятый сигнал несколько ниже или выше по частоте, то выходной сигнал фильтра взаимной корреляции будет немного меньше. Для простого импульса отклик фильтра взаимной корреляции следует как функция допплеровской частоты по знакомой огибающей SIN X/X. В крайних случаях принятый сигнал может быть так смещен по частоте так, что он совпадет с одним из боковых лепестков передаваемого сигнала. Заметьте, что у коротких импульсов относительно широкий начальный лепесток в характеристике sin x/x, а также тенденция иметь допплеровский допуск, сравнимый с допуском при длинных импульсах. В других схемах сжатия импульса, таких как кодирование Баркера, выходной сигнал согласующего фильтра падает много быстрее, чем SIN X/X у простого импульса, что делает их нетерпимыми к допплеровскому эффекту. Допплеровский сдвиг у линейно модулированных по частоте импульсов может создать ошибку в информации о местоположении, потому что наиболее высокая взаимная корреляция происходит, когда частоты свипирования у принятого импульса точно совпадают с частотами свипирования у переданного импульса. Эта отстройка прямо пропорциональна допплеровскому сдвигу.
Уравнение дальности действия радиолокатора
Уравнение дальности действия радиолокатора описывает важные переменные характеристики радиолокатора и создает основу для понимания измерений, которые выполняются, чтобы убедится в оптимальной работе радиолокатора. В этом разделе рассматриваются основы вывода уравнения дальности действия и важные переменные характеристики, названные в уравнении. Остальная часть заметок по применению будет затем обсуждать методы измерений и их модификации, которые имеются для оценки этих переменных характеристик. Вывод формулы начинается с анализа простой сферической модели рассеивания при распространении для ненаправленного излучателя или антенны точечного источника. Предположим для простоты, что антенна равномерно облучает внутреннюю поверхность воображаемой сферы с равномерной плотностью мощности на каждую единицу площади поверхности, где площадь поверхности сферы равна:
где:
As – площадь сферы;
R – радиус сферы.
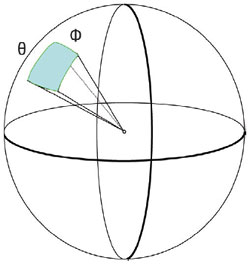
Рисунок 2 – Излучение идеальной ненаправленной антенны
Плотность мощности находится путем деления общей излучаемой мощности в ваттах на площадь поверхности сферы в квадратных метрах.

где:
p – плотность мощности в ваттах на квадратный метр;
Pt – общая излучаемая мощность в ваттах.
Так как радиолокационные системы используют направленные антенны для фокусирования излучаемой энергии на цель, уравнение может быть преобразовано к численной величине направленного коэффициента усиления антенны G. Усиление антенны определяется как отношение мощности, направленной на цель, к мощности идеальной ненаправленной антенны.

где:
pt – плотность мощности, направленной на цель от направленной антенны;
Gt – усиление направленной антенны.
Уравнение описывает передаваемую плотность мощности, которая приходит к цели. Часть этой энергии будет отражаться по различным направлениям, а часть энергии будет переизлучаться обратно к радиолокационной системе. Величина связанной с этим плотности мощности, которая переизлучается обратно к радиолокатору, является функцией поперечного сечения радиолокатора (ПСР или ) со стороны цели. ПСР ( ) имеет размерность площади и является мерой размеров цели, видимой радиолокатором. С этой информацией уравнение может быть расширено для нахождения плотности мощности, возвращенной к антенне радиолокатора. Это делается путем умножения переданной плотности мощности на отношение ПСР к площади сферы.